
La velocidad angular es una medida de la velocidad de rotación. Se define como el ángulo girado por una unidad de tiempo[1] y se designa mediante la letra griega ω. Su unidad en el Sistema Internacional es el radián por segundo (rad/s).
Aunque se la define para el movimiento de rotación del sólido rígido, también se la emplea en la cinemática de la partícula o punto material, especialmente cuando esta se mueve sobre una trayectoria cerrada (circular, elíptica, etc). La magnitud del pseudovector representa la velocidad angular, la tasa a la que el objeto rota o gira, y su dirección es normal respecto al plano de rotación instantáneo o desplazamiento angular. La orientación de la velocidad angular se especifica convencionalmente mediante la regla de la mano derecha.[2]
Existen dos tipos de velocidad angular.
- Velocidad angular orbital se refiere a la rapidez con que un objeto puntual revoluciona alrededor de un origen fijo, es decir, la tasa de cambio temporal de su posición angular con respecto al origen
- Velocidad angular de giro se refiere a la rapidez con que un cuerpo rígido gira con respecto a su centro de rotación y es independiente de la elección del origen, en contraste con la velocidad angular orbital.
En general, la velocidad angular tiene dimensión de ángulo por unidad de tiempo (el ángulo sustituye a la distancia de la velocidad lineal con el tiempo en común). La unidad SI de velocidad angular es radianes por segundo,[3] siendo el radián una cantidad adimensional, por lo que las unidades SI de velocidad angular pueden enumerarse como s−1. La velocidad angular se suele representar con el símbolo omega (ω, a veces Ω). Por convención, la velocidad angular positiva indica rotación en sentido antihorario, mientras que la negativa es en sentido horario.
Por ejemplo, un satélite geoestacionaria completa una órbita por día sobre el ecuador, o 360 grados por 24 horas, y tiene velocidad angular ω = (360°)/(24 h) = 15°/h, o (2π rad)/(24 h) ≈ 0,26 rad/h. Si el ángulo se mide en radianes, la velocidad lineal es el radio por la velocidad angular, . Con un radio orbital de 42.000 km desde el centro de la Tierra, la velocidad del satélite en el espacio es, por tanto, "v" = 42.000 km &veces; 0,26/h ≈ 11.000 km/h. La velocidad angular es positiva, ya que el satélite se desplaza hacia el Este con la rotación de la Tierra (en el sentido contrario a las agujas del reloj desde arriba del polo norte).

YouTube Encyclopedic
-
1/5Views:209 669509 374113 81310 483643 247
-
VELOCIDAD ANGULAR VELOCIDAD LINEAL
-
FISICA Movimiento circular uniforme MCU 01 BACHILLERATO
-
Velocidad Angular Del MCU
-
Velocidad angular (movimiento circular uniforme mcu) ejemplo 3 de 6 | Física - Vitual
-
Clase 1, Movimiento Circular Uniforme
Transcription
Velocidad angular en un movimiento plano circular

Para un objeto que gira alrededor de un eje, en cada punto a lo largo del trayecto, el objeto tiene la misma velocidad angular. La velocidad tangencial de cualquier punto es proporcional a su distancia del eje de rotación. Las unidades de velocidad angular son los radianes/segundo, de modo que su valor instantáneo queda definido por la derivada:

En un movimiento circular uniforme, dado que una revolución completa representa 2π radianes, tenemos:

donde T es el período (tiempo en dar una vuelta completa) y f es la frecuencia (número de revoluciones o vueltas por unidad de tiempo). De modo que

Velocidad angular en un movimiento plano general
En el caso de un movimiento plano no circular general hay que definir la velocidad angular siempre respecto de un punto. Por ejemplo, al estudiar la órbita de la tierra respecto del sol, el punto más apropiado será el foco de la elipse donde se encuentra el sol.
La velocidad angular será la tasa de variación del ángulo subtendido del vector de posición r respecto del punto dado, y su valor numérico dependerá del punto escogido.
Dado que el movimiento radial desde el punto dado no contribuye a aumentar el ángulo subtendido, solo la componente tangencial lo hará. Por tanto podemos decir

Multiplicando arriba y abajo por el radio vector:

Lo que apunta a que puede escribirse en función del producto vectorial r x v
Vector velocidad angular

Se define el vector velocidad angular ω, como un vector axial paralelo al eje de rotación, cuyo módulo es el valor de la velocidad angular anteriormente definida, o sea
(1)

, cuya dirección es la del eje de giro y cuyo sentido coincide con el del avance de un tornillo que girase en el sentido en que lo hace el sólido (regla de la mano derecha). Si designamos por e al vector que indica la dirección del eje, y cuya dirección sea la definida por la regla anterior, tenemos
(2)

donde hemos considerado al elemento de ángulo dθ como un vector dθ, de módulo dθ, cuya dirección está definida por la regla del tornillo. Llamando et y en a los vectores tangencial y normal, respectivamente, a la trayectoria del punto genérico P, la velocidad de ese punto puede expresarse en la forma
(3)

de modo que podemos afirmar:
- La velocidad v de un punto genérico P del sólido rígido en rotación es igual al momento del vector velocidad angular ω con respecto a dicho punto P.
Así pues, conocida la velocidad angular ω queda determinada la distribución de velocidades en todos los puntos del sólido rígido en rotación. La expresión [8] puede escribirse en la forma
(4)

donde es el vector de posición del punto genérico P con respecto a un punto cualquiera del eje de rotación.

Las definiciones anteriores exigen que el vector velocidad angular ω tenga carácter deslizante sobre el eje de rotación.
Es importante destacar que el «vector» velocidad angular no es un vector polar, sino un pseudovector o vector axial. Por esta razón, en teoría de la relatividad, donde el espacio-tiempo tiene cuatro dimensiones, no puede ser representado por ningún tetravector, razón por la cual en teoría de la relatividad la velocidad angular se representa por un 2-tensor antisimétrico, que tiene que satisfacer las leyes de transformación adecuadas bajo las transformaciones de Lorentz. En la siguiente sección se dan algunos detalles adicionales, sobre por qué la velocidad angular se puede representar por un tensor antisimétrico.
Velocidad angular de un triedro
Esto vale tanto para un sistema de referencia rotatorio como para un sólido rígido
Tensor velocidad angular
La forma matricial para representar la velocidad angular, puede ser deducida a partir de matrices de rotación. Cualquier vector tridimensional que gira alrededor de un eje con velocidad angular (de acuerdo a las definiciones anteriores) satisface:


Puede introducirse ahora el tensor velocidad angular asociado con la velocidad angular anterior como


Este tensor antisimétrico actúa como si fuera un operador:



Dada una matriz de rotación , se puede obtener en cada instante el tensor velocidad angular W como se muestra a continuación, se cumple que:

Como la velocidad angular debe ser la misma para los tres vectores de un mismo sistema de referencia, si la matriz cuyas tres columnas son tres vectores unitarios mutuamente perpendiculares, podemos escribir la relación:

(*)

Y por tanto la velocidad angular se puede definir simplemente como:

Otra forma de obtener directamente la velocidad angular de una rotación es derivando la relación:

De donde se obtiene que la matriz antisimétrica definida como:

Coincide con la definición dada antes para el tensor velocidad angular. Puede demostrarse que cualquier grupo uniparamétrico de matrices de rotación puede obtenerse como la curva integral de la siguiente ecuación diferencial () cuya solución se puede expresar como exponencial de una matriz como:

La definición de la velocidad angular como tensor permite generalizar el concepto de velocidad angular a un espacio euclídeo de dimensión para n > 3.

Velocidad angular de giro de un cuerpo rígido o marco de referencia
Dado un marco de rotación de tres vectores de coordenadas unitarias, los tres deben tener la misma velocidad angular en cada instante. En dicho marco, cada vector puede considerarse como una partícula en movimiento con radio escalar constante.
El marco de rotación aparece en el contexto de cuerpos rígidos, y se han desarrollado herramientas especiales para él: la velocidad angular de espín puede describirse como un vector o, equivalentemente, como un tensor.
De acuerdo con la definición general, la velocidad angular de espín de un marco se define como la velocidad angular orbital de cualquiera de los tres vectores (el mismo para todos) con respecto a su propio centro de rotación. La suma de los vectores de velocidad angular de los cuadros también se define mediante la suma vectorial habitual (composición de movimientos lineales), y puede ser útil para descomponer la rotación como en un cardán. Todas las componentes del vector pueden calcularse como derivadas de los parámetros que definen los cuadros en movimiento (ángulos de Euler o matrices de rotación). Como en el caso general, la suma es conmutativa: .

Por teorema de rotación de Euler, cualquier marco en rotación posee un eje instantáneo de rotación, que es la dirección del vector velocidad angular, y la magnitud de la velocidad angular es consistente con el caso bidimensional.
Si elegimos un punto de referencia fijo en el cuerpo rígido, la velocidad de cualquier punto del cuerpo viene dada por



Componentes a partir de los vectores base de un marco de referencia cuerpo-fijo
Considere un cuerpo rígido que gira alrededor de un punto fijo O. Construya un marco de referencia en el cuerpo que consiste en un conjunto ortonormal de vectores fijados al cuerpo y con su origen común en O. El vector velocidad angular de espín tanto del marco como del cuerpo alrededor de O es entonces


donde es la tasa de cambio temporal del vector marco debido a la rotación.


Esta fórmula es incompatible con la expresión de la velocidad angular orbital

ya que esa fórmula define la velocidad angular para un único punto alrededor de O, mientras que la fórmula de esta sección se aplica a un marco o cuerpo rígido. En el caso de un cuerpo rígido un tiene que dar cuenta del movimiento de todas las partículas en el cuerpo.
Componentes a partir de ángulos de Euler

Las componentes del pseudovector velocidad angular de espín fueron calculadas por primera vez por Leonhard Euler utilizando sus ángulos de Euler y el uso de un marco intermedio:
- Un eje del marco de referencia (el eje de precesión)
- La línea de nodos del marco móvil con respecto al marco de referencia (eje de nutación)
- Un eje del marco móvil (eje de rotación intrínseco).
Euler demostró que las proyecciones del pseudovector velocidad angular sobre cada uno de estos tres ejes es la derivada de su ángulo asociado (lo que equivale a descomponer la rotación instantánea en tres rotaciones de Euler instantáneas). Por lo tanto:[4]

Esta base no es ortonormal y es difícil de usar, pero ahora el vector velocidad puede cambiarse al marco fijo o al marco móvil con sólo cambiar las bases. Por ejemplo, cambiando al marco móvil:

donde son vectores unitarios para el marco fijo en el cuerpo en movimiento. Este ejemplo se ha realizado utilizando la convención Z-X-Z para los ángulos de Euler.[cita requerida]

Consideraciones sobre cuerpos rígidos
.
Las mismas ecuaciones para la velocidad angular pueden obtenerse razonando sobre un cuerpo rígido en rotación. Aquí no se supone que el cuerpo rígido gire alrededor del origen. En su lugar, se puede suponer que gira alrededor de un punto arbitrario que se mueve con una velocidad lineal V(t) en cada instante.
Para obtener las ecuaciones, es conveniente imaginar un cuerpo rígido unido a las cuadernas y considerar un sistema de coordenadas fijo respecto al cuerpo rígido. A continuación estudiaremos las transformaciones de coordenadas entre este sistema de coordenadas y el sistema fijo del "laboratorio".
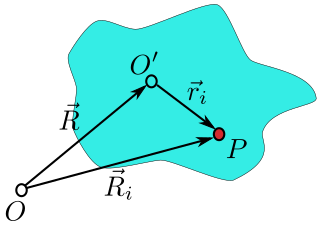
Como se muestra en la figura de la derecha, el origen del sistema del laboratorio está en el punto O, el origen del sistema del cuerpo rígido está en O y el vector de O a O es R. Una partícula (i) en el cuerpo rígido se encuentra en el punto P y el vector posición de esta partícula es Ri en el marco del laboratorio, y en la posición ri en el marco del cuerpo. Se véase que la posición de la partícula puede escribirse:

La característica que define a un cuerpo rígido es que la distancia entre dos puntos cualesquiera de un cuerpo rígido es invariable en el tiempo. Esto significa que la longitud del vector es invariable. Por teorema de rotación de Euler, podemos sustituir el vector por donde es una matriz de rotación 3×3 y es la posición de la partícula en algún punto fijo del tiempo, digamos t = 0. Esta sustitución es útil, porque ahora es sólo la matriz de rotación que está cambiando en el tiempo y no el vector de referencia , como el cuerpo rígido gira alrededor del punto O. Además, como las tres columnas de la matriz de rotación representan los tres versores de un sistema de referencia que gira junto con el cuerpo rígido, ahora se hace visible cualquier rotación sobre cualquier eje, mientras que el vector no giraría si el eje de rotación fuera paralelo a él, y por tanto sólo describiría una rotación sobre un eje perpendicular a él (es decir, no vería la componente del pseudovector velocidad angular paralela a ella, y sólo permitiría calcular la componente perpendicular a ella). La posición de la partícula se escribe ahora como:





Tomando la derivada temporal se obtiene la velocidad de la partícula:

donde V i es la velocidad de la partícula (en el marco de laboratorio) y V es la velocidad de O' (el origen del marco de cuerpo rígido). Como es una matriz de rotación su inversa es su transpuesta. Así que sustituimos :




o

donde es el tensor de velocidad angular anterior.

Se puede probar que se trata de una matriz antisimétrica, por lo que podemos tomar su dual para obtener un pseudovector tridimensional que es precisamente el anterior vector de velocidad angular :
![{\displaystyle {\boldsymbol {\omega }}=[\omega _{x},\omega _{y},\omega _{z}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c8f418d52c41570663e22f7b19a8d3a427b69cab)
Sustituyendo ω por W en la expresión de velocidad anterior, y sustituyendo la multiplicación de matrices por un producto cruzado equivalente:

Se puede véase que la velocidad de un punto en un cuerpo rígido se puede dividir en dos términos - la velocidad de un punto de referencia fijado en el cuerpo rígido más el término de producto cruzado que implica la velocidad angular orbital de la partícula con respecto al punto de referencia. Esta velocidad angular es lo que los físicos llaman velocidad angular de espín del cuerpo rígido, en contraposición a la velocidad angular orbital del punto de referencia O' respecto al origen O.
Unidades
En el sistema internacional de unidades las velocidad angulares tienen unidades de inverso de segundo , también llamado hercio . Es frecuente expresar también la velocidad angular en "revoluciones por minuto" aunque esa unidad no forma parte del sistema internacional.
![{\displaystyle [{\text{s}}^{-1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/27a046eb9e303df6f7d2d25f2e5e7be1adda093b)
![{\displaystyle [{\text{Hz}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9e703161de350fcb9fca7cbe74402c25ce897512)
![{\displaystyle [{\text{r.p.m.}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44a2d0ff23a7ec2bd28c0aa02243d8114cd3bf76)
Muchos textos emplean aún el "radián por segundo", aunque el radián es una pseudounidad que no forma parte del sistema internacional de unidades y su uso está desrecomendado profesionalmente, aunque se mantiene en algunos contextos con fines didácticos nada más.
Véase también
Referencias
- ↑ Real Academia Española. «velocidad angular». Diccionario de la lengua española (23.ª edición).
- ↑ Hibbeler, Russell C. (2009). Mecánica de la Ingeniería. Upper Saddle River, New Jersey: Pearson Prentice Hall. pp. 314, 153. ISBN 978-0-13-607791-6.(EM1)
- ↑ Taylor, Barry N. (2009). Sistema Internacional de Unidades (SI) (revised 2008 edición). DIANE Publishing. p. 27. ISBN 978-1-4379-1558-7. Extracto de la página 27
- ↑ K.S.HEDRIH: Leonhard Euler (1707-1783) y la dinámica del cuerpo rígido
Bibliografía
- Ortega, Manuel R. (1986 2016). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-RFC CACM869929DG5.
- Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). Nueva York: John Wiley & Sons. ISBN 0-471-32057-9.
- Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición). Brooks/Cole. ISBN 0-534-40842-7.
- Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN 84-291-4382-3.
- https://cibertareas.info/velocidad-angular-fisica-1.html
| Control de autoridades |
|
|---|
 Datos: Q161635
Datos: Q161635 Multimedia: Angular velocity / Q161635
Multimedia: Angular velocity / Q161635