
En ingeniería eléctrica e ingeniería mecánica, una respuesta transitoria es el comportamiento de un sistema frente a un cambio desde un estado de equilibrio o estable. No está necesariamente ligada a cambios abruptos, sino a cualquier evento que afecte el equilibrio del sistema. La respuesta a impulso y la de paso son fenómenos transitorios de respuesta a una entrada específica (un impulso y un paso, respectivamente).
En ingeniería eléctrica específicamente, es la respuesta temporal de un circuito que se extingue con el tiempo.[1] Le sigue la respuesta de estado estable, que es el comportamiento del circuito mucho tiempo después de que se aplica una excitación externa.
Amortiguación
La respuesta se puede clasificar como uno de los tres tipos de amortiguación que describe la salida en relación con la respuesta de estado estable.
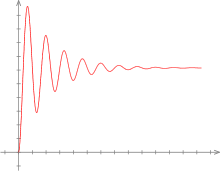
- Subamortiguado
- Una respuesta subamortiguada es aquella que oscila dentro de una envolvente que decae. Cuanto más subamortiguado es el sistema, más oscilaciones y más tiempo se tarda en alcanzar el estado estable. Aquí, la relación de amortiguación es siempre menor que uno.
- Críticamente amortiguado
- Una respuesta críticamente amortiguada es aquella que alcanza el valor de estado estable más rápido sin llegar a estar subamortiguada. Se relaciona con los puntos críticos en el sentido de que se extiende a ambos lados del límite de las respuestas subamortiguadas y sobreamortiguadas. Aquí, la relación de amortiguación es siempre igual a uno. No debería haber oscilación sobre el valor de estado estable en el caso ideal.
- Sobreamortiguado
- Una respuesta sobreamortiguada es la que no oscila alrededor del valor de estado estable pero tarda más en alcanzar el estado estable que en el caso críticamente amortiguado. Aquí la relación de amortiguación es mayor que uno.
Propiedades

La respuesta transitoria se puede cuantificar con las siguientes propiedades:
- Tiempo de subida
- El tiempo de subida se refiere al intervalo necesario para que una señal cambie de un valor bajo dado a un valor alto dado. Normalmente, estos dos valores son el 10% y el 90% de la altura del salto o escalón.
- Sobreimpulso
- El sobreimpulso se produce cuando una señal o función rebasa su objetivo (el valor alto dado). A menudo se asocia con el timbre.
- Tiempo de estabilización
- El tiempo de estabilización es el transcurrido desde la aplicación de una entrada de paso instantáneo ideal hasta el momento en que la salida ha entrado y permanecido dentro de una banda de error especificada,[2] el tiempo después del cual se satisface la siguiente igualdad:
- donde es el valor de estado estacionario, y define el ancho de la banda de error.
- Tiempo de retardo
- El tiempo de retardo es el necesario para que la respuesta alcance inicialmente la mitad del valor final.[3]
- Tiempo del pico
- El tiempo del pico es el necesario para que la respuesta alcance el primer pico del rebasamiento.
- Error de estado estable
- El error de estado estable es la diferencia entre la salida final deseada y la real cuando el sistema alcanza un estado estable, y se puede esperar que su comportamiento continúe sin cambios si el sistema no es perturbado.[4]



Véase también
Referencias
- ↑ Alexander, Charles K.; Sadiku, Matthew N. O. (2012). Fundamentals of Electric Circuits. McGraw Hill. p. 276.
- ↑ Victor Glushkov. Encyclopedia of Cybernetics (1 edición). Kiev: USE. p. 624.
- ↑ Ogata, Katsuhiko. Modern Control Engineering (4 edición). Prentice-Hall. p. 230. ISBN 0-13-043245-8.
- ↑ Lipták, Béla G. (2003). Instrument Engineers' Handbook: Process control and optimization (4th edición). CRC Press. p. 108. ISBN 0-8493-1081-4.
| Control de autoridades |
|
|---|
 Datos: Q1974593
Datos: Q1974593