Для установки нажмите кнопочку Установить расширение. И это всё.
Исходный код расширения WIKI 2 регулярно проверяется специалистами Mozilla Foundation, Google и Apple. Вы также можете это сделать в любой момент.
Как перевоплотить Википедию
Хотите, чтобы Википедия всегда выглядела так профессионально и современно? Мы создали расширение для браузера. Оно совершенствует любую страницу энциклопедии, которую вы посетите, с помощью магических технологий WIKI 2.
Попробуйте — вы его можете удалить в любой момент.
Установить за 5 сек.
Да-да, но позже
4,5
Келли Слэйтон
Мои поздравления с отличным проектом... что за великолепная идея!
Александр Григорьевский
Я использую WIKI 2 каждый день и почти забыл как выглядит оригинальная Википедия.
В сравнении с углами Эйлера кватернионы позволяют комбинировать вращения, а также избежать проблемы, связанной с невозможностью поворота вокруг оси независимо от совершённого вращения по другим осям (см. Кватернионы и вращение пространства).
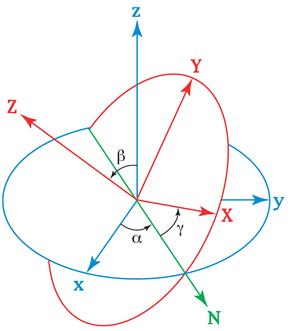
Углы Эйлера определяют три поворота системы, которые позволяют привести любое положение системы к текущему. Обозначим начальную систему координат как , конечную как . Пересечение координатных плоскостей и называется линией узлов.
Угол между осью и линией узлов — угол прецессии.
Угол между осями и — угол нутации.
Угол между линией узлов и осью — угол собственного вращения.
Повороты системы на эти углы называются прецессия, нутация и поворот на собственный угол (вращение). Такие повороты некоммутативны, и конечное положение системы зависит от порядка, в котором совершаются повороты. В случае углов Эйлера производится серия из трёх поворотов:
На угол вокруг оси . При этом ось переходит в .
На угол вокруг оси . При этом ось переходит в .
На угол вокруг оси . При этом ось переходит в .
Иногда такую последовательность называют 3,1,3 (или Z,X,Z), но такое обозначение может приводить к двусмысленности.
Формулы
Углы Эйлера описывают последовательную комбинацию пассивных поворотов[en] вокруг осей вращающейся системы координат. Матрицы этих поворотов имеют вид
Последовательное выполнение этих поворотов даст матрицу
Произведение , где — координаты точки до поворота, даст координаты точки в подвижной системе координат после поворота. До и после поворота координаты точки в неподвижной системе координат неизменны.