
Последовательный КАМАК (или КАМАК-A2, от CAMAC — Computer Automated Measurement and Control) — способ организации многокрейтовой КАМАК-системы при помощи последовательного канала Highway.
Стандартизация последовательного КАМАК оформлялась следующими документами:
| Используемое название | Пояснение | Организация по стандартизации | |||
|---|---|---|---|---|---|
| ESONE | IEEE | IEC | ГОСТ | ||
| КАМАК-А2, Последовательный КАМАК | Последовательная ветвь до 62 крейтов | EUR 6100 | IEEE 595—1982 | IEC 640 | ГОСТ 26.201.2-94 Система КАМАК. Требования к интерфейсу последовательной магистрали |
Топология сети крейтов
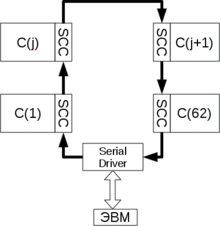
Все крейты, подключённые к шине объединяются в кольцо. Между каждыми двумя крейтами устанавливается последовательный канал с 8-битным байтом. Кольцо замыкается через последовательный драйвер (англ. Serial Driver, SD). Последовательный драйвер соединяется с ЭВМ, владеющей шиной.
Соединение производится при помощи двух или девяти витых пар для последовательного или параллельно-последовательного обмена. При этом одна витая пара передаёт синхронизирующий сигнал и одна или восемь — информацию, содержащуюся в посылке.
Физические характеристики шины
Максимальная тактовая частота на шине равна 5 МГц.
Все сообщения передаются побайтно и следуют одно за другим. При последовательной передаче сообщение содержит стартовый (нулевой) бит, 8 информационных битов и стоповый бит (единичный). Байты передаются начиная с наименьшего значащего разряда.
При параллельно-последовательной передаче за один так синхросигнала передаётся один байт информации.
Протокол взаимодействия
В каждом передаваемом байте разряды 7 и 6 используются в качестве служебных для контроля чётности и для определения конца посылки. Остальные 6 разрядов содержат информационную посылку:
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| Контроль чётности | Признак конца | Информационная посылка | |||||
Бит конца сообщения равен нулю во время передачи посылки. Для сигнализации об окончании посылки используется байт, в котором этот бит установлен в единицу.
Сообщения протокола
В таблице приведена структура некоторых наиболее важных сообщений, используемых при передаче данных по последовательной шине.
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | Пояснение |
|---|---|---|---|---|---|---|---|---|
| CMD—Общее командное сообщение (9 или 5 байт) | Описывает одну команду. В случае, если команда не предусматривает передачу данных, байты 4..7 не передаются. | |||||||
| P0 | 0 | SC5 | SC4 | SC3 | SC2 | SC1 | SC0 | SC5..0 — Адрес крейта, которому предназначена команда. |
| P1 | 0 | 0 | 0 | SA3 | SA2 | SA1 | SA0 | Биты в разрядах 5 и 4 — идентификатор типа посылки. SA3..0 — субадрес модуля. |
| P2 | 0 | 1 | SF3 | SF3 | SF2 | SF1 | SF0 | SF3..0 — номер функции. |
| P3 | 0 | 1 | SN3 | SN3 | SN2 | SN1 | SN0 | SN3..0 — номер модуля. |
| P4 | 0 | SW23 | SW22 | SW21 | SW20 | SW19 | SW18 | SW23..0 — передаваемые данные. В зависимости от номера функции эта секция может отсутствовать. |
| P5 | 0 | SW17 | SW16 | SW15 | SW14 | SW13 | SW12 | |
| P6 | 0 | SW11 | SW10 | SW9 | SW8 | SW7 | SW6 | |
| P7 | 0 | SW5 | SW4 | SW3 | SW2 | SW1 | SW0 | |
| P8 | 0 | S5 | S4 | S3 | S2 | S1 | S0 | S5..0 — биты контроля чётности по столбцам. |
| SPACE—Байт заполнения | SPACE-байты передаются для резервирования позиций в потоке, куда крейд сможет записать результат выполнения команды. | |||||||
| 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | Передаётся только последовательным драйвером. |
| WAIT—Байт ожидания | WAIT-байты по шине тогда, когда шина не загружена. | |||||||
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | Отсутствует передача на данном такте. |
| RPY—Общее ответное сообщение (7 или 3 байта) | Посылается вместо сообщения команды (с использованием резервных байт). Информирует о результате выполнения команды. В случае, если команда не предусматривает передачу данных, байты 2..5 не передаются. | |||||||
| P0 | 0 | SC5 | SC4 | SC3 | SC2 | SC1 | SC0 | SC5..0 — Адрес крейта, от которого поступил ответ. |
| P1 | 0 | 0 | 1 | DERR | SQ | SX | ERR | Биты в разрядах 5 и 4 — идентификатор типа посылки. DERR, SQ, SX, ERR—флаги. |
| P2 | 0 | SR23 | SR22 | SR21 | SR20 | SR19 | SR18 | SR23..0 — передаваемые данные. В зависимости от номера функции эта секция может отсутствовать. |
| P3 | 0 | SR17 | SR16 | SR15 | SR14 | SR13 | SR12 | |
| P4 | 0 | SR11 | SR10 | SR9 | SR8 | SR7 | SR6 | |
| P5 | 0 | SR5 | SR4 | SR3 | SR2 | SR1 | SR0 | |
| P6 | 0 | S5 | S4 | S3 | S2 | S1 | S0 | S5..0 — биты контроля чётности по столбцам. |
| SRPY—Укороченное ответное сообщение | Посылается вместо сообщения команды. Информирует о приёме команды. | |||||||
| P0 | 0 | SC5 | SC4 | SC3 | SC2 | SC1 | SC0 | SC5..0 — Адрес крейта, от которого поступил ответ. |
| P2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | S5..0 — биты контроля чётности по столбцам. |
| DMD—Запрос на обслуживание | Аналог прерывания. Посылается для извещения ЭВМ о событии. | |||||||
| P0 | 0 | SC5 | SC4 | SC3 | SC2 | SC1 | SC0 | SC5..0 — Адрес крейта, сгеенерировавшего запрос. |
| P1 | 0 | 1 | SL4 | SL3 | SL2 | SL1 | SL0 | SL4..0 — Номер модуля-источника запроса. |
| P6 | 0 | S5 | S4 | S3 | S2 | S1 | S0 | S5..0 — биты контроля чётности по столбцам. |
Ссылки
- ГОСТ 26.201.2-94 Система КАМАК. Последовательная магистраль интерфейсной системы
- http://standards.globalspec.com/std/681406/ieee-595
| Компьютерные шины и интерфейсы | |
|---|---|
| Основные понятия | |
| Процессоры | |
| Внутренние | |
| Ноутбуки | |
| Накопители | |
| Периферия | |
| Управление оборудованием | |
| Универсальные | |
| Видеоинтерфейсы | |
| Встраиваемые системы | |
| Стандарты IEEE | |||||||
|---|---|---|---|---|---|---|---|
| Текущие |
| ||||||
| Серия 802 |
| ||||||
| Серия P | |||||||
| Заменены | |||||||
Обычно почти сразу, изредка в течении часа.